When is an Absolute Encoder Right for Your Design?
When you need to measure the speed, direction of motion or position of a rotating shaft, you will likely require a rotary encoder. And when it comes time to choose one, there are two main types to consider: the incremental encoder and the absolute encoder.
Making the right choice is important, which is why we have put together this short guide to absolute encoders, to help you understand what they are, how they differ from incremental encoders, and the situations where you might need one.
What is an Absolute Encoder?
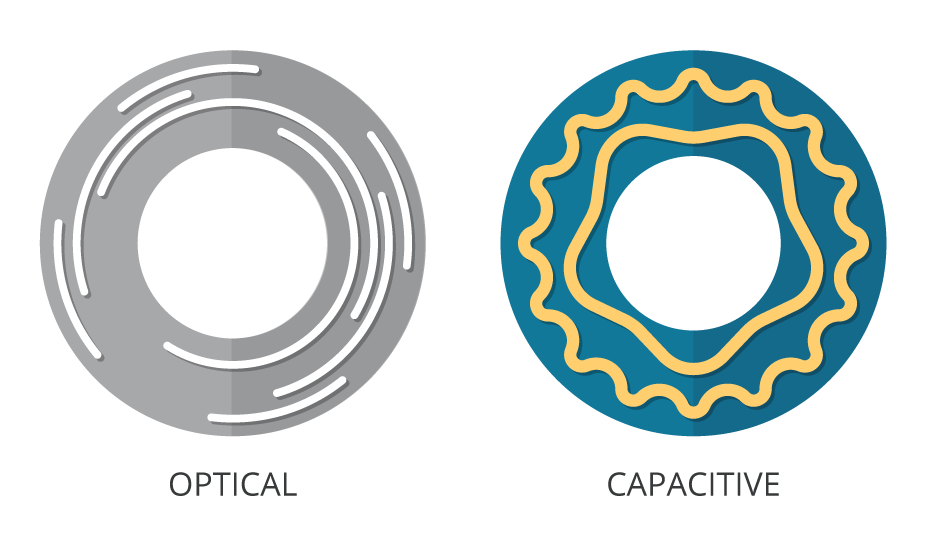
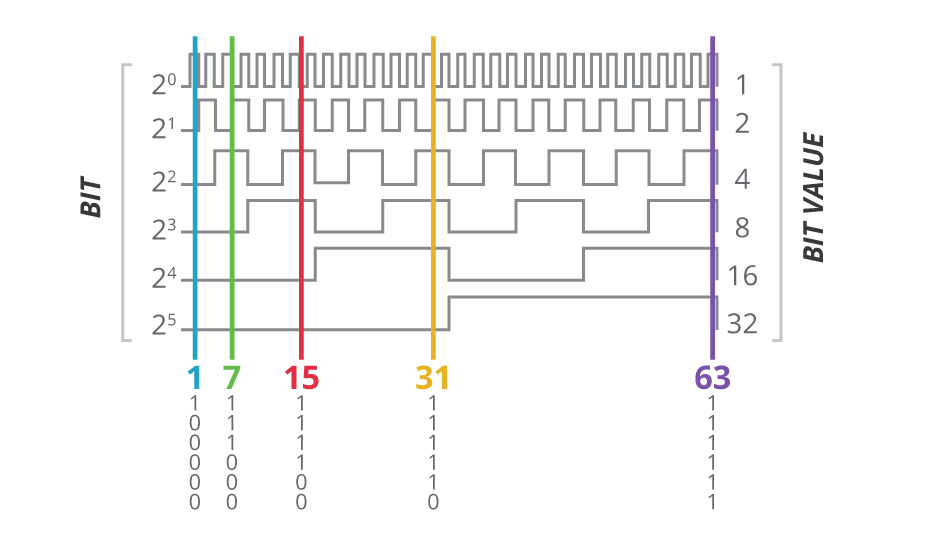
An absolute encoder provides a unique position value or data word at every point of rotation representing the “absolute” position of the encoder. From the moment you switch it on, an absolute encoder can tell you the exact position of the rotating shaft that it is measuring. It does this by using an optical, magnetic, or capacitive sensor to read a unique code off of a disc that rotates with the shaft. Crucially, an absolute encoder can do this without needing to turn the shaft and can keep track of this position even in instances of temporary power loss. The more unique codes there are on the encoder’s disc, the more precise your position reading will be.
Resolutions are represented in terms of bits (binary digits) that correspond to the number of unique data words over one revolution. Absolute encoders also come in single-turn and multi-turn variations. Single-turn encoders provide positioning data over one full revolution, 360°, with the output repeating for every revolution of the shaft. Multi-turn encoders also provide positioning data over a single turn, but have an additional “turns” counter that measures the number of revolutions.
Absolute vs. Incremental Encoders
Conversely, an incremental encoder works by generating pulses as the shaft rotates. A typical incremental encoder generates 2 square waves 90 degrees out of phase. These pulses must be tracked or counted by electronics external to the encoder.
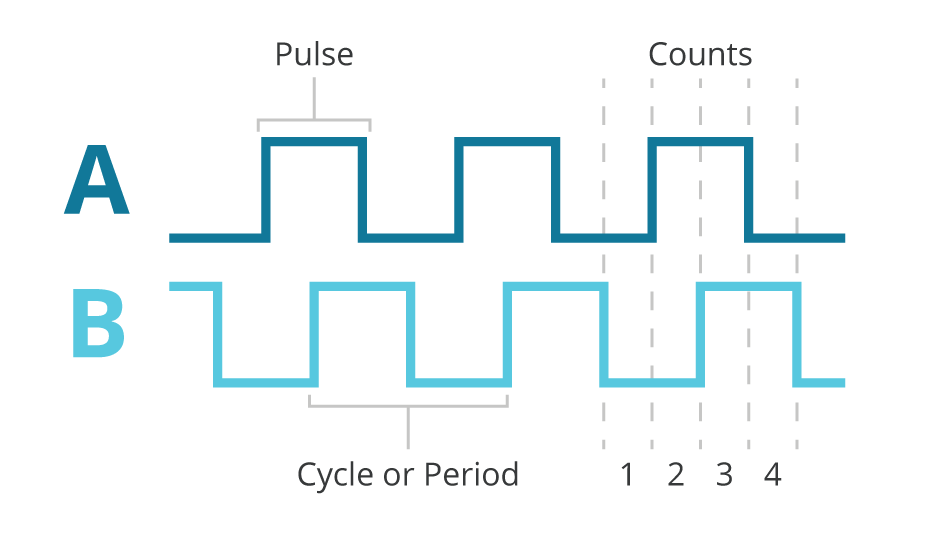
Resolutions are represented by the number of pulses per revolution, PPR, and represent the number of high pulses an incremental encoder will have from either of its square wave outputs. For more information on an encoder’s PPR, check out our blog post on the topic.
Because the output of an incremental encoder is only ever in 1 of 4 repeating states the encoder must be referenced to a known fixed location or "home" to provide meaningful positioning information. From the home location, often aligned with the encoder’s index pulse, the incremental change in rotation of the shaft can then be tracked and the absolute position of the shaft known. This must happen every time you switch the incremental encoder on, or in cases of temporary power loss. Consequently, it takes longer to get the absolute position reading – and the shaft needs to turn in order to provide it.
Incremental encoders are less complex than absolute models, and therefore typically less expensive (though the price difference is shrinking). If you are only monitoring speed, the direction of motion, or the relative position, an incremental encoder is usually the best option, but when absolute position is your key concern, an absolute encoder is the way to go.
Why Select an Absolute Encoder over an Incremental Encoder?
Firstly, because an absolute encoder maintains the position of the shaft, the position is known as soon as you deliver power to it. You do not need to wait for a homing or calibration sequence to complete and can get the position data you need more quickly at startup or following a power failure, even if the shaft has been turned while the encoder was off.
Knowing the absolute position at start up can be essential in many systems, where in certain positions it is safe to continue rotating the shaft in one direction, but not the other. Depending on the application, getting this wrong could cause damage to the equipment, bodily injury, or worse. In situations like these, it is critical you know the exact position of your rotating device before any parts move.
Equally important, an absolute encoder provides true position in real time. As more and more systems are becoming digital with connections to a central communication bus, being able to poll the encoder for real time position when and as needed, with minimal latency, is of great benefit. To keep track of your position with an incremental encoder, even after the homing sequence, you need to track of all the pulses with external circuitry (typically via quadrature decoding). In addition to the external circuity needed, this also means that there is some latency in determining the position.
There are other benefits as well. Systems that implement absolute encoders are generally less susceptible to electrical noise because they obtain position by reading an error-checked code from binary encoders, or digitally over a serial bus, rather than incremental encoders that need to count pulses.
Linked to this is the fact that it is relatively straightforward to combine more than one absolute encoder in the same system – perhaps for factory automation or in a robotic arm with multiple joints. If you use incremental encoders, monitoring the outputs from multiple devices can get very complicated, requiring significant processing power. But with absolute encoders, particularly those that you can link to a central communication bus, you can obtain data from each one individually, which requires much less processing power to interpret the reading.
Absolute Encoder Applications
Having set out the key differences between absolute and incremental encoders, let us look briefly at some specific scenarios where absolute encoders are used.
A key market is robotics – a rapidly expanding area covering a wide variety of sectors. In manufacturing, you will find robotic arms used for assembly, welding, paint spraying and other tasks. You will also find them in healthcare. Remote surgery, for example, requires large amounts of exceptionally precise positional information from robotic arms. Home-assistance robots are another emerging use case for absolute encoders.
However, this is just one area, with more systems going digital and the price gap between incremental and absolute encoders shrinking, the variety of applications for absolute encoders is becoming almost endless, both in the industrial and consumer markets. From automated gates and camera gimbals to factory automation, absolute encoders are a highly effective and increasingly budget-friendly way of determining position.
Your Absolute Encoder Options
Picking the right type of encoder for your product design is essential, which is why it is so important to understand the key differences between incremental and absolute encoders. With price gaps closing and technologies changing, absolute encoders hold many distinct advantages over their incremental counterparts, making them an intriguing option for your position feedback requirements.
 Tags:
Tags:
Additional Resources