An Introduction to MEMS Microphone Arrays
Microphones are used in a variety of applications to convert audio sounds into electrical signals. MEMS microphones, which feature omnidirectional directivity, pick up sounds equally from any direction. Unfortunately, the sound converted into the electrical signals often contains unwanted noise, in addition to the sounds of interest. As a result, arrays of MEMS microphones and the associated electronics can be employed to improve the quality of the sound which is being detected. These arrays are designed to create a directional response, also known as beamforming, that filters out unwanted noise and processes sound from a more desired direction(s). In this blog post we will cover the basics of MEMS microphone arrays, including their working principles, common configurations, and typical applications.
MEMS Microphone Arrays Overview
The ratio of the desired sound (signal) to the undesired sounds (noise) is termed the signal-to-noise ratio (SNR). A MEMS microphone array can be used to enhance the desired sound and to reduce the undesired sounds and thus improve the SNR of the system.

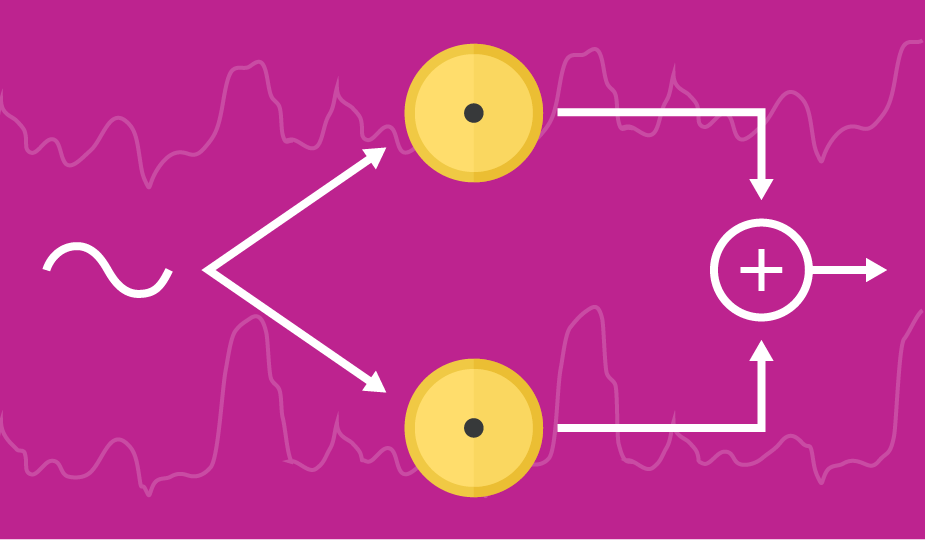
In constructing a MEMS microphone array, two or more microphones are used to collect audio sounds and the electrical signals from each microphone are combined to produce a resultant electrical signal. Electronic circuits are employed to process the signals from each microphone (amplify, delay, filter, etc.) before the signals are combined. As a result of the electrical processing, the desired signals are enhanced and the undesired signals are attenuated. For the signal processing to be effective, the microphones employed in the array must either have tightly matched performance specifications or be individually characterized for specification performance. The sensitivity of the microphones is the primary parameter that is required to be well matched in the array. Due to semiconductor manufacturing processes, MEMS microphones are readily available with tightly matched sensitivity tolerances, making them the ideal choice for microphone arrays.
Broadside Microphone Arrays
Many microphone applications have a specific source for the desired sound. Therefore, "listening" to sounds from that direction and "ignoring" sounds from other directions can improve the SNR of the system. Broadside microphone arrays are a one or two-dimensional array of microphones placed perpendicular to the source of the desired sound, with the signals from each microphone summed to produce the desired electrical signal. Sounds originating from a direction perpendicular to the array will arrive at the microphones at the same time and thus will sum constructively in the electronic processing. Sounds originating from a direction other than perpendicular to the array will arrive at the microphones with differing time delays. In general, the signals with the differing time delays will not sum as "nicely", producing a lower level electronic signal.
An audio interface to a computer monitor or TV screen is a good application of a broadside microphone array. The array would be constructed in the same plane as the display since the user is located directly in front of the screen. In addition, the array can be implemented within the physical depth of the existing display.

Endfire Microphone Arrays
An endfire microphone array is constructed by arranging a line of microphones in the direction of the desired sound source, where the desired sound arrives at each microphone with a different time delay. The processing circuit for each microphone can employ an electronic time delay to compensate for the audio time delay of the microphones. Endfire microphone arrays are similar to broadside microphone arrays in that the signals from the desired direction sum in a constructive manner, but signals from directions other than the desired direction sum to a lower value.
While both broadside and endfire microphone arrays enhance sound capture along the desired axis and attenuate other noise sources, the broadside array captures sound equally well both in front of and behind the microphone array. An endfire array will only capture sound in front of the array and will attenuate noise from behind the array as well as all other directions. It is also required to be physically oriented towards the sound of interest. A handheld microphone is a good application for this topology where the device can be pointed directly at the person who is talking (or singing) and capture only that signal.

Additional MEMS Microphone Array Applications
MEMS microphone arrays can also be employed to determine the direction of a sound relative to the array. In one common implementation of this application, microphones are placed on the perimeter of a circle or a sphere. Electronic signal processing is used to identify the desired signal from each microphone, while the relative time delay of the desired signal between each microphone is used to determine the source of the sound relative to the microphone array.
A common application for sound location microphone arrays is gunshot detection for the police and military. The digital signal processing (DSP) circuits associated with the microphone array can differentiate the characteristics of a gunshot from other noises and then determine the direction from which the gun was fired.

Conclusion
Arrays of MEMS microphones and the associated electronic circuitry can be used to enhance the monitoring of sounds. Consumer electronics applications are typically designed with two to ten microphones to control the final cost to the user. Where performance is of primary importance, arrays incorporating more than 300 microphones are available to provide tight three-dimensional spatial resolution over the entire audio spectrum. These microphone arrays are used in applications such as security detection and surveillance. However, the implementation of microphone arrays requires microphones with well-matched characteristics. This is why MEMS microphones with their low cost and tight sensitivity tolerances are the preferred choice for designers of microphone array applications.
 Tags:
Tags:
Additional Resources